I Heart Roboticsが、ROSのrovioスタックをリリースしました。これにはWowWee Rovio用のコントローラー、ジョイスティックによるリモートコントロールためのノード、関連のローンチ用ファイルが含まれています。またRovioのカメラに接続するためにbrown-ros-pkgのprobeパッケージを使う場合の説明と設定もこちらにあります。
アーバンチャレンジに参加したたくさんの自動車と同じように、MarvinはVelodyne社のHDL lidarとApplanix Position and Orientation System for Land Vehicles (POS-LV)を備えています。これらのドライバーはutexas-art-ros-pkgリポジトリ内のapplanixパッケージとvelodyneスタックにそれぞれ公開されています。velodyneスタックは障害物や運転できる地形を検出するためのライブラリと、rviz上で可視化する(ビジュアライズ)のためのツールが含まれています。
京都大学の奥乃博教授、高橋徹特任助教、ホンダ・リサーチ・インスティチュート・ジャパン(HRI-JP)シニア・リサーチャーの中臺一博さん、京都大学と東京工業大学の大学院生4人のみなさんがウィローガレージに1週間滞在し、テレプレゼンスロボットのテキサイにHARKを搭載しました。HARKとは、HRI-JPと京都大学が共同で研究開発しているロボット聴覚システム(Honda Research Institute-Japan Audition for Robots with Kyoto University)のことです。このロボット聴覚システムは、音源定位、音源分離、音声認識特徴量抽出、音声認識機能を備えています。
カリフォルニアにある独ボッシュ社の研究機関ボッシュ研究開発センター(Bosch's Research and Technology Center/RTC)は、過去一年間、セグウェイRMPをベースにしたロボットにROSを使い、探検(exploration)、三次元マッピング、テレプレゼンスの研究を行っています。最近彼らのexplorationスタックのバージョン0.1がbosch-ros-pkgリポジトリにリリースされました。これはROSのnavigationスタックと統合され、2次元の探検(exploration)を可能にするものです。bosch_demosスタックを使うと、この機能をシミュレーション上で試すことができます。
Ioan Şucan(ライス大学 Lydia Kavraki研究室)は、ウィローガレージでの2008年と2009年の夏期インターン中にこのフレームワークの最初のバージョンを開発し、それ以降も重要な貢献をし続けています。Lydia Kavraki研究室で何年もかけて開発された様々な確率的計画法を含むOMPL計画ライブラリも彼の貢献の一つにあげられます。
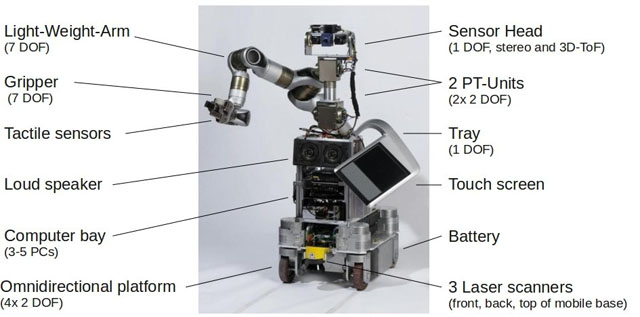
このロボットでは、片側でマニピュレーション、もう片側ではインタラクションが可能になっています。マニピュレーションを行う側には、物体を把持するためのSDHグリッパがついたSCHUNK製のLightweight Arm 3(軽量アーム3)が備わっています。またインタラクションを行う側には、インプットだけでなく「アウトプット」もできるタッチスクリーン付きのトレイがついています。人々は、タッチスクリーンを使って飲み物を注文するなどのタスクを選ぶこと(インプット)ができ、トレイは注文された飲み物などの物体をのせてその人のところまで運ぶこと(アウトプット)ができます。
ROS用の最初のNaoドライバーは、2009年11月にブラウン大学RLABによってリリースされました。このリリースには頭部コントロール、テキストの音声変換、基本的ナビゲーション、前面カメラへのアクセスが含まれていました。そのたった2、3日後にフライブルク大学(ドイツ)のヒューマノイド・ロボット研究室がブラウン大学のNaoドライバーを使って、走行距離測定、ジョイスティックでの遠隔操作を含む新しい機能を開発したんです。しかも開発はそこでは終わりませんでした。同12月、ヒューマノイド・ロボット研究室は、IMU(Inertial Measurement Unit 慣性計測装置)情報、URDF形式モデル、rvizでのデータ可視化など多くを加えて、Nao用の完全なROSスタックを作り上げたのです。
 I Heart Roboticsが、ROSのrovioスタックをリリースしました。これにはWowWee Rovio用のコントローラー、ジョイスティックによるリモートコントロールためのノード、関連のローンチ用ファイルが含まれています。またRovioのカメラに接続するためにbrown-ros-pkgのprobeパッケージを使う場合の説明と設定もこちらにあります。
I Heart Roboticsが、ROSのrovioスタックをリリースしました。これにはWowWee Rovio用のコントローラー、ジョイスティックによるリモートコントロールためのノード、関連のローンチ用ファイルが含まれています。またRovioのカメラに接続するためにbrown-ros-pkgのprobeパッケージを使う場合の説明と設定もこちらにあります。