米国西海岸時間 July 8, 2010
過去10年間、
東京大学JSK研究室 は、
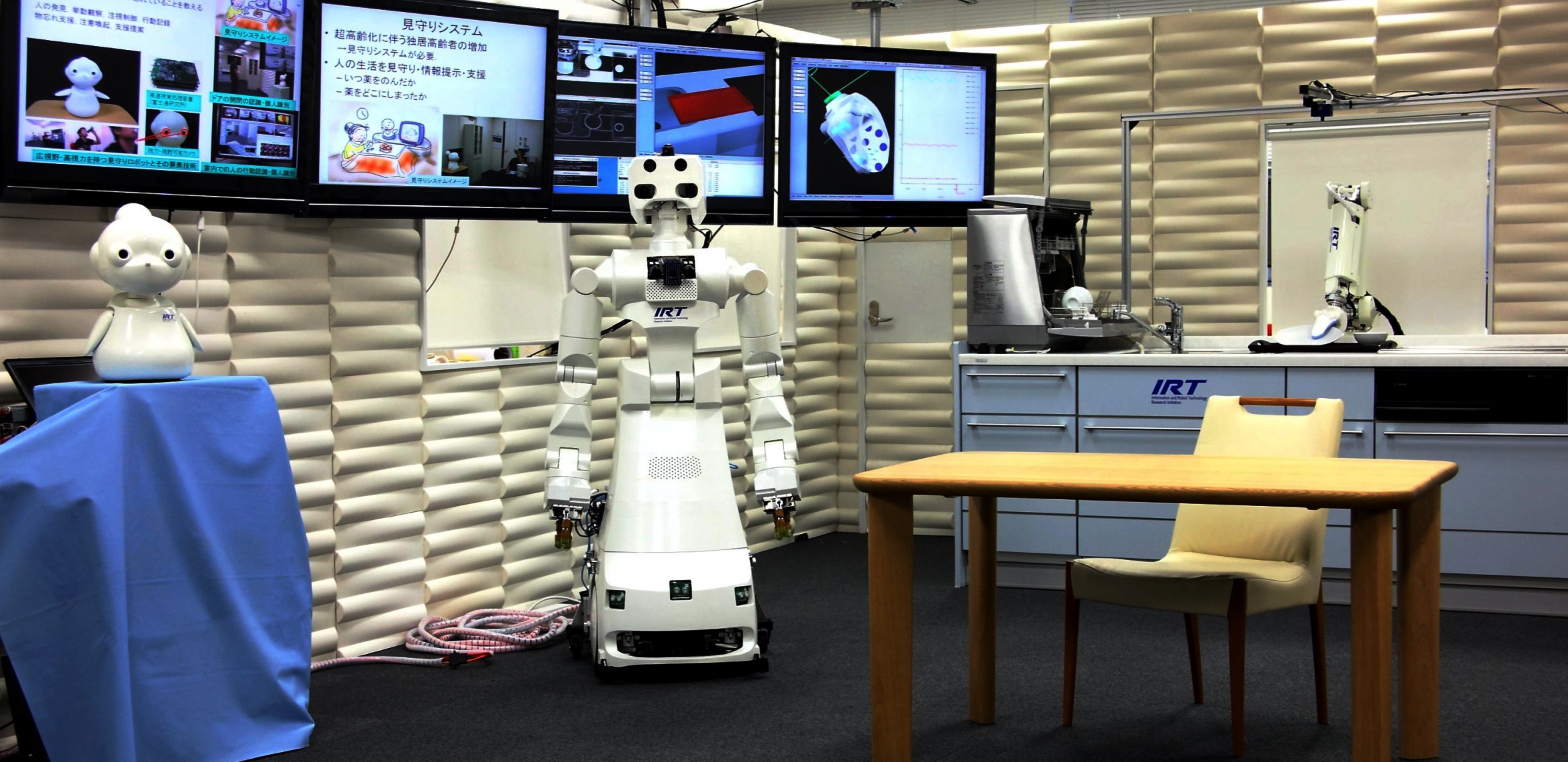
ヒューマノイドロボットHRP2 に、掃除、片付け、オーブンや食器洗い機の操作、野菜を切る、床の掃き掃除などの家事をさせることに取り組んできました。さらにJSKは、日本が直面している急速な少子高齢化社会の様々な課題を、
ITとロボット技術を融合したIRT 基板技術によって解決することを目指す、IRTプロジェクトの中核的存在です。IRTの目標の1つは
社会や生活を支援する3つのロボットシステム 、1)
キッチンアシストロボットシステム 、2)
ホームアシスタントロボットシステム 、3)そばにいる人の状況を常に観察し、認識・判断を行ない、役に立つアドバイスをするか、他にサポートしてくれる人にコンタクトをとる
介護・支援ロボットシステム を実現することです。
JSKのチームは、2009年春からウィローガレージと共同研究を始め、PR2ですでにいくつかのデモ(
2009年3月 、
2010年3月 )を成功させています。この実績を元に、JSKはPR2ベータプログラムのプロジェクト案を「複数のロボットの協働による人間環境における日常作業のための自律的動作計画」としました。
このプロジェクトの目標でユニークなのは、HRP2とPR2の両方を使い複数のロボットによる協働を実現することです。人間が主体の環境でインタラクションするには、人間や他のロボットを含め、周囲の状況が絶え間なく変化していることを理解する必要があります。JSKチームは、異なる運動学、センサー、制御フレームワークを有するロボットの相互運用を研究していきます。
このプロジェクトでは、マニピュレーションプランニング、タスクプランニング、ダイナミック動作、エラー検出、復旧といった高次の認識モジュールが研究の焦点となるでしょう。推進にあたっての指針としては、パラメーター補正なしか微補正のみで、しかも事前の動作教示や位置の限定を最小限に抑えた形で、人間(ユーザー)がロボットに新しいタスクの仕方を教えやすいシステムをデザインすることです。
またJSKは、ROSを3つのメジャーなフレームワークである、EusLisp、OpenRAVE、OpenRTMと統合させます。JSKは20年近くに渡り、ロボットプログラミング用Lisp言語であるEusLispでソフトウェアのフレームワークを開発してきました。ROSとこのフレームワークが組み合わさることで、EusLispで書かれたプログラムが、より分散型かつマルチプロセスの環境で、ハイレベルのスクリプトとタスクの遂行のために使われるようになります。
JSKのもう一つのプロジェクト、動作計画アルゴリズム開発のためのOpenRAVEはあっという間に人気のプラットフォームになりました。
OpenRAVEは、自律的マニピュレーションにおいて「何が実行可能か」、「現実的か」、「再利用可能か」、「他のロボットへの適用性があるか」について、長らく信じられてきた事を、改めて定義しています。OpenRAVEは、CMUのRosen Diankovによって創られたものであり、彼は今後JSKでこのプラットフォームの研究を続けていきます。
最後に、JSKのOpenRTMプロジェクトは日本政府の資金によって研究が行われており、日本で最も多く支持されていプラットフォームです。日本では、最新のヒューマノイドロボットを含め、多くのプロトタイプがOpenRTMを通して直接ドライバーを提供しています。JSKは、既に提供されているROSの環境を再利用しながら、EusLisp、OpenRAVE、OpenRTM間に特化した信頼性の高いモジュールが、徐々にできていくのを期待しています。
JSKの長期的な目標は、ロボットが職場や家庭で人々の日常を助けることができるロボットを創りだすことです。このロボットは、職場ではオフィスや建物を移動しながら、物を片付けたり、取りに行ったり、運んだり、渡したりする能力を持ちます。また、家庭においては、家電や他の道具を操作して高齢者や障害のある人の支援を行うことができるロボットです。
JSKチームについて
このプロジェクトは、約30名の学生と10名の教員からなるJSK全体の協力を得て行われます。
プロジェクトリーダー
稲葉雅幸教授
岡田慧准教授
出杏光魯仙博士
プレゼンテーション
下は、PR2ベータプログラムに参加する11研究機関を対象にしたワークショップにおける岡田慧准教授のプレゼンテーションです。
PDFバージョンのダウンロードは
こちら から。
原文






{kind=link}