
Care-O-bot 3は独フラウンホーファーIPA(生産技術・オートメーション研究所)によって設計された移動マニピュレーションロボットで、 商用のバトラー(使用人)ロボットとしても、研究用プラットフォームとしても利用することができます。Care-O-botのソフトは最近、短期間のうちにROSに統合され、すでに低位のデバイスドライバーからGazeboでのシミュレーションまでサポートされています。
このロボットでは、片側でマニピュレーション、もう片側ではインタラクションが可能になっています。マニピュレーションを行う側には、物体を把持するためのSDHグリッパがついたSCHUNK製のLightweight Arm 3(軽量アーム3)が備わっています。またインタラクションを行う側には、インプットだけでなく「アウトプット」もできるタッチスクリーン付きのトレイがついています。人々は、タッチスクリーンを使って飲み物を注文するなどのタスクを選ぶこと(インプット)ができ、トレイは注文された飲み物などの物体をのせてその人のところまで運ぶこと(アウトプット)ができます。
Care-O-botの研究のゴールは、
- このハードウェアのためのオープンソースのリポジトリを提供する
- コンポーネントのシミュレーションモデルを提供する
- Care-O-bot 3へのリモートアクセスを可能にする
の3点です。
最初の2つのゴールは、オープンソースのROSレポジトリであるcare-o-botとしてすでに行われていて、ドライバーやシミュレーション、基本的なアプリケーションなどが公開され利用可能となってています。ソースコードをダウンロードし、ベースを操縦したり腕を動かしたり、といった様々なタスクをシミュレーションすることが簡単にできます。そしてこれらのことが、彼らのウェブポータルを使ってCare-O-Botの実機にリモートアクセスするという3つ目の目標を可能にします。
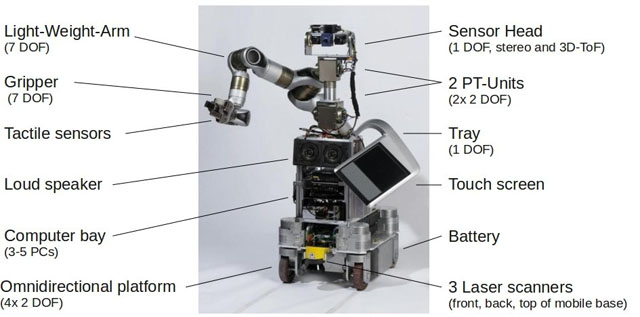
センシングに関しては、Care-O-botはSICK製のS300レーザースキャナーを2つと北陽製のURG-04LXレーザースキャナーを1つ、Pike製のfirewireカメラF-145をステレオビジョン用に2つと、Swissranger製のSR3000とSR4000を備えています。 cob3_driverスタックにはROSとこれらのセンサーを統合するsick_s300、cob3_camera_sensors、cob3_hokuyoといったパッケージが提供されています。
Care-O-botはSCHUNK製のLWA3アーム、SDHグリッパと、人や環境と相互作用するためにPRL 100につけられたトレイを備え、CANインターフェースによって動きます。さらにSCHUNK製のパン・チルト可能なユニットPW 90とPW 70 panを備えているので、発砲体でできた胴体がおじぎすることができます。このCANインターフェースはCare-O-bot向けROSパッケージであるcob_generic_can、cob_canopen_motor、libpcanとlibntcan用のラッパーなどによってサポートされていて、SCHUNK製のコンポーネントはsdh、powercube_chain、libm5apiパッケージによってサポートされています。
下のビデオではCare-O-botが動いている様子をごらんになれます。(注: Care-O-botのソースコードはまだROSに統合中で、このビデオに出てくる機能はまだROSリポジトリには入っていません。)
0 件のコメント:
コメントを投稿