米国西海岸時間: March 11, 2010
アルデバランのNaoと同じく、コロラド大学Correll研究室のプラットフォーム、「プレーリードッグ」もお互いの研究成果を活用しながら形成されていくROSコミュニティの一例になっています。何よりいいのは、あなたも自分で作れるという点です。
プレーリードッグはiRobot Createの上に作られた教育、研究用の統合プラットフォームです。移動、運動学、センシング、位置同定など主要なトピックの他、協調などマルチロボット独自の課題を教育研究するコロラド大学のマルチロボットシステムコースで使用されています。地図作成と位置同定を含むプレーリードッグのソースコードはROSリポジトリprairiedog-ros-pkgの一部として利用が可能です。
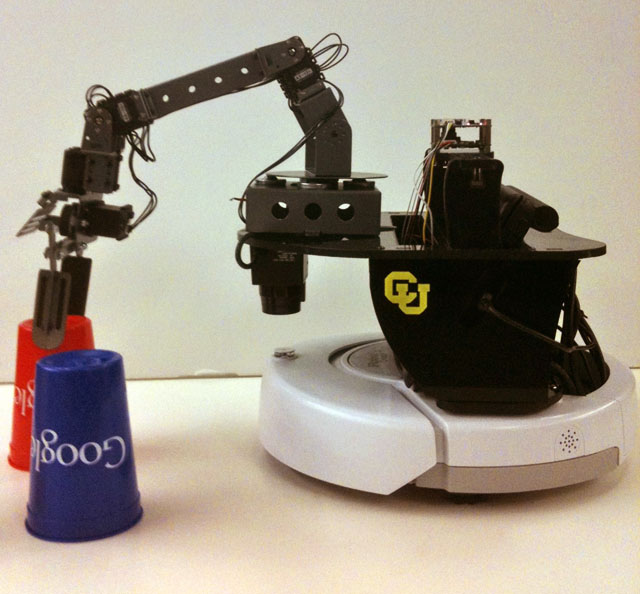
プレーリードッグは、市販されている様々なハードウェア、例えばiRobot Create ベース、CrustCrawlerの4自由度アーム AX-12、北陽電気レーザレンジファイダ URG-04LX、HAGIZONICの室内用位置認識システム スターゲイザー、Logitechのウェブカメラ QuickCam 3000を使っています。Correll研究室は、brown-ros-pkgのirobot_create、robotis等のROSパッケージを活用して自分たちのprairiedog-ros-pkgを作り公開することができました。またプレーリードッグは、モーションプランニング環境のライブラリであるOpenRAVEと統合されています。
2010年秋からRoadNarrows Roboticsが、すべての市販部品の他、予備ナットやボトルが入ったプレーリードッグのキットを販売します。価格はまだ発表されていhttp://willowgarageja.blogspot.com/2010/06/pr2-beta-sites-spotlight-bosch.htmlませんが、ネットブックを含む基本的な部分はたぶん3500ドルぐらいになるのではと思います。
さらに詳しくは
をごらんください。
 (写真は、家族連れに囲まれ忙しく地図作成するプレーリードッグ)
(写真は、家族連れに囲まれ忙しく地図作成するプレーリードッグ)
0 件のコメント:
コメントを投稿